|
A* Pathfinding Project
3.1.4
The A* Pathfinding Project for Unity 3D
|
|
A* Pathfinding Project
3.1.4
The A* Pathfinding Project for Unity 3D
|
Basic point graph. More...
 Inheritance diagram for PointGraph: Collaboration diagram for PointGraph:
Inheritance diagram for PointGraph: Collaboration diagram for PointGraph:Public Member Functions | |
| void | AddChildren (ref int c, Transform tr) |
| Recursively adds childrens of a transform as nodes. | |
| void | DeSerializeNodes (Node[] nodes, AstarSerializer serializer) |
| void | DeSerializeSettings (AstarSerializer serializer) |
| bool | IsValidConnection (Node a, Node b, out float dist) |
| Returns if the connection between a and b is valid. | |
| override void | Scan () |
| Scans the graph, called from AstarPath.Scan Override this function to implement custom scanning logic | |
| void | SerializeNodes (Node[] nodes, AstarSerializer serializer) |
| void | SerializeSettings (AstarSerializer serializer) |
| void | UpdateArea (GraphUpdateObject guo) |
| Updates an area in the list graph. | |
| Public Member Functions inherited from NavGraph | |
| virtual void | Awake () |
| This will be called on the same time as Awake on the gameObject which the AstarPath script is attached to. | |
| virtual Node[] | CreateNodes (int number) |
| Creates a number of nodes with the correct type for the graph. | |
| virtual void | DeserializeExtraInfo (byte[] bytes) |
| Deserializes graph type specific node data. | |
| NNInfo | GetNearest (Vector3 position) |
| Returns the nearest node to a position using the default NNConstraint. | |
| NNInfo | GetNearest (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified NNConstraint. | |
| virtual NNInfo | GetNearest (Vector3 position, NNConstraint constraint, Node hint) |
| Returns the nearest node to a position using the specified NNConstraint. | |
| virtual NNInfo | GetNearestForce (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified constraint. | |
| bool | InSearchTree (Node node, Path path) |
| Returns if the node is in the search tree of the path. | |
| virtual Color | NodeColor (Node node, NodeRunData data) |
| virtual void | OnDestroy () |
| Function for cleaning up references. | |
| virtual void | OnDrawGizmos (bool drawNodes) |
| virtual void | PostDeserialization () |
| Called after all deserialization has been done for all graphs. | |
| virtual void | RelocateNodes (Matrix4x4 oldMatrix, Matrix4x4 newMatrix) |
| Relocates the nodes in this graph. | |
| void | SafeOnDestroy () |
| SafeOnDestroy should be used when there is a risk that the pathfinding is searching through this graph when called | |
| void | ScanGraph () |
| Consider using AstarPath.Scan () instead since this function might screw things up if there is more than one graph. | |
| virtual byte[] | SerializeExtraInfo () |
| Serializes graph type specific node data. | |
| Public Member Functions inherited from ISerializableGraph | |
| Node[] | CreateNodes (int num) |
| void | DeSerializeNodes (Node[] nodes, AstarSerializer serializer) |
| void | SerializeNodes (Node[] nodes, AstarSerializer serializer) |
| Public Member Functions inherited from ISerializableObject | |
| void | DeSerializeSettings (AstarSerializer serializer) |
| Called to deserialize the object. | |
| void | SerializeSettings (AstarSerializer serializer) |
| Called to serialize the object. | |
| Public Member Functions inherited from IUpdatableGraph | |
| void | UpdateArea (GraphUpdateObject o) |
| Updates an area using the specified GraphUpdateObject. | |
Static Public Member Functions | |
| static int | CountChildren (Transform tr) |
| Recursively counds children of a transform. | |
Public Attributes | |
| bool | autoLinkNodes = true |
| Vector3 | limits |
| Max distance along the axis for a connection to be valid. | |
| LayerMask | mask |
| Layer mask to use for raycast. | |
| float | maxDistance = 0 |
| Max distance for a connection to be valid. | |
| bool | raycast = true |
| Use raycasts to check connections. | |
| bool | recursive = true |
| Recursively search for childnodes to the root. | |
| Transform | root |
| Childs of this transform are treated as nodes. | |
| string | searchTag |
| If no root is set, all nodes with the tag is used as nodes. | |
| bool | thickRaycast = false |
| Use thick raycast. | |
| float | thickRaycastRadius = 1 |
| Thick raycast radius. | |
| Public Attributes inherited from NavGraph | |
| byte[] | _sguid |
| Used to store the guid value. | |
| AstarPath | active |
| Reference to the AstarPath object in the scene. | |
| bool | drawGizmos = true |
| bool | infoScreenOpen |
| Used in the editor to check if the info screen is open. | |
| uint | initialPenalty = 0 |
| Matrix4x4 | matrix |
| A matrix for translating/rotating/scaling the graph. | |
| string | name |
| Node[] | nodes |
| All nodes this graph contains. | |
| bool | open |
| Is the graph open in the editor | |
Private Attributes | |
| GameObject[] | nodeGameObjects |
| GameObjects which defined the node in the nodes array. | |
Additional Inherited Members | |
| Properties inherited from NavGraph | |
| Guid | guid [get, set] |
| Used as an ID of the graph, considered to be unique. | |
| Matrix4x4 | inverseMatrix [get] |
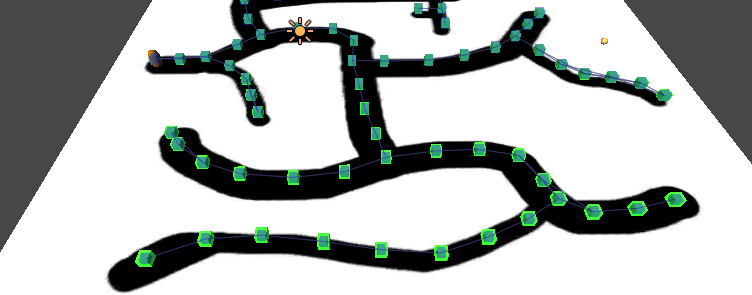
Basic point graph.
The List graph is the most basic graph structure, it consists of a number of interconnected points in space, waypoints or nodes.
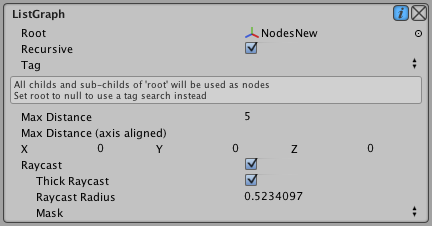
The list graph takes a Transform object as "root", this Transform will be searched for child objects, every child object will be treated as a node. It will then check if any connections between the nodes can be made, first it will check if the distance between the nodes isn't too large ( maxDistance ) and then it will check if the axis aligned distance isn't too high. The axis aligned distance, named limits, is useful because usually an AI cannot climb very high, but linking nodes far away from each other, but on the same Y level should still be possible. limits and maxDistance won't affect anything if the values are 0 (zero) though.
Lastly it will check if there are any obstructions between the nodes using raycasting which can optionally be thick.
One thing to think about when using raycasting is to either place the nodes a small distance above the ground in your scene or to make sure that the ground is not in the raycast mask to avoid the raycast from hitting the ground.
Returns if the connection between a and b is valid.
Checks for obstructions using raycasts (if enabled) and checks for height differences.
As a bonus, it outputs the distance between the nodes too if the connection is valid
Here is the caller graph for this function:
|
virtual |
Scans the graph, called from AstarPath.Scan Override this function to implement custom scanning logic
Implements NavGraph.
Here is the call graph for this function:| void UpdateArea | ( | GraphUpdateObject | guo | ) |
Updates an area in the list graph.
Recalculates possibly affected connections, i.e all connectionlines passing trough the bounds of the guo will be recalculated
Here is the call graph for this function:| Vector3 limits |
Max distance along the axis for a connection to be valid.
0 = infinity
| float maxDistance = 0 |
Max distance for a connection to be valid.
0 = infinity
|
private |
GameObjects which defined the node in the nodes array.
Entries are permitted to be null in case no GameObject was used to define a node.
 1.8.2
1.8.2 
